Automatisierter und handgesteuerter Roboterarm
 zurück zur Projektübersichtsseite der Klasse HBFA11
zurück zur Projektübersichtsseite der Klasse HBFA11
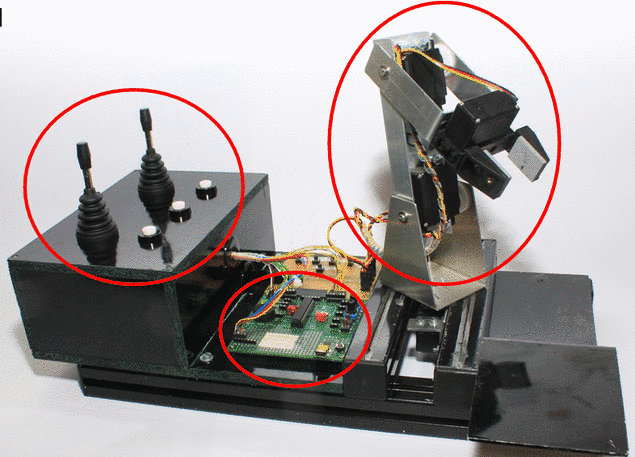
Bei diesem Projekt sieht man drei Grundlagen, die zur Funktion des Roboterarms beitragen. Zum ersten ist es der Roboterarm selbst, den wir in der Unterstufe als Projekt bearbeitet haben. Auf der Steuerplatine (2. Komponente), befinden sich die Programme zum ansteuern des Armes. Die zwei Joysticks steuern die Servomotoren an, um die Position des Greifers zu ändern. Zusätzlich werden zwei Automatikprogramme, über zwei Taster angesteuert, die einen vorprogrammierten Ablauf nachfahren.
zurück zur Projektübersichtsseite der Klasse HBFA11
- Menü 1Stunden- Vertretungsplan
- Menü 2Bücher, Fahrkarten, iPads
- Menü 3Schulneubau
- Menü 4Aktuelle Projekte
- Menü 4.1• Projekte 2021/22
- Menü 4.2• Projekte 2022/23
- Menü 4.3• Projekte 2023/24
- Menü 5Pressespiegel
- Menü 6Schultage/Praktikumstage
- Menü 7Termine
- Menü 8Film
- Menü 9Downloads

